Lección Teach
Robot Arduino Visual (4/4): reto de marcas y reacción
El alumnado combina movimiento, sensores, marcas y reglas de reacción en un reto de robot con programación visual y evidencia de prueba documentada.
Resultados de aprendizaje
Usar sensores de línea como evidencia de superficie clara/oscura.
Diseñar un comportamiento reactivo corto con entrada, decisión y salida.
Evaluar un robot por evidencia y explicación, no por una trayectoria perfecta.
Vista previa de la actividad del estudiante
Contenido de la actividad
Solo vista previa. En una sesión de clase, los estudiantes pueden completar respuestas y entregar su trabajo al docente.
Elegir un reto alcanzable
8 min
Los sensores de línea del robot miran la superficie y devuelven una lectura
de reflectancia: un número aproximado de 0 a 2000. Las superficies claras
dan valores bajos (cerca de 0) y las oscuras, valores altos (cerca de
2000). Un umbral es el número de corte que usas para decidir "claro" u
"oscuro". El reto no es seguir una línea perfecta, sino medir claro/oscuro y
programar una reacción.
Elige uno de estos retos. Todos son válidos si usan un sensor, una decisión y una salida observable.
- Detector de marca: al detectar una zona oscura, parar y encender rojo.
- Patrulla con aviso: avanzar despacio y avisar si detecta una marca oscura.
- Robot prudente: combinar proximidad y marca; si hay obstáculo o marca, parar.
- Semáforo de superficie: azul en superficie clara, rojo en superficie oscura, sin moverse.
No se pide seguir una línea completa. Se pide explicar qué detecta el robot y cómo reacciona.
Escribe tu reto elegido en forma de regla: "Si el sensor detecta..., entonces el robot...; si no, el robot...".
Calibrar claro y oscuro
18 min
Para ver la lectura usarás la serie (un canal de texto del robot a tu
pantalla). Si tu laboratorio no muestra la salida serie, calibra con el LED:
enciende el rojo cuando la lectura supere tu umbral y comprueba si distingue una
superficie clara de una oscura; ajusta el umbral hasta que acierte.
Abre el robot visual.
Configura comunicación serie.
En el bucle principal, usa
Leer sensores de linea.Lee un sensor concreto, por ejemplo
centro,centro-izquierdaocentro-derecha.Escribe el valor por serie.
Observa una lectura sobre superficie clara y otra sobre una zona oscura o marca visible.
Elige un umbral entre ambas lecturas.
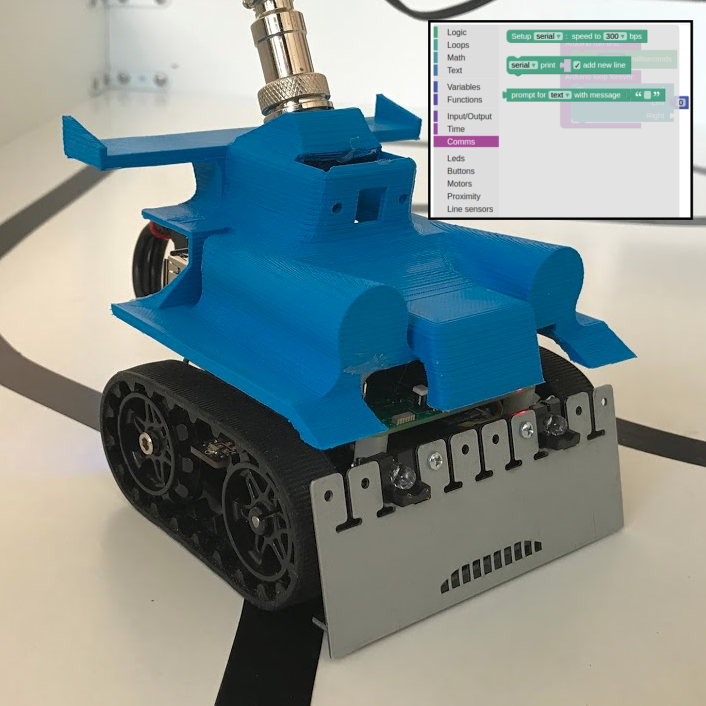
Imagen y referencia para calibrar:
Antes de usar mensajes:
[Configuración] Serial velocidad 9600
En el bucle principal:
[Leer sensores de linea]
[Escribir]
Lectura en sensor situado en centro
o
Lectura en sensor situado en centro-izquierda
o
Lectura en sensor situado en centro-derecha
[Esperar] 300 milisegundosEl bloque de lectura debe ir antes del valor del sensor. Primero mide claro y oscuro; después eliges el umbral.
Rellena la tabla mientras calibras claro y oscuro. Usa al menos dos filas:
una para superficie clara y otra para superficie oscura o marca. Si pruebas otra
posición de marca, añade una fila más; deja las demás vacías. En cada fila
anota el sensor, la superficie, el valor observado, el umbral propuesto y tu
confianza.
| Sensor | Superficie | Valor observado (número o claro/oscuro) | Umbral propuesto | Confianza |
|---|---|---|---|---|
¿Qué umbral usarás para distinguir claro y oscuro? Debe estar justificado por dos lecturas de tu tabla.
Construir el comportamiento
22 min
Construye una versión mínima de tu reto:
1. Leer sensores.
2. Comparar lectura con el umbral.
3. Activar salida visible: LED, mensaje serie y, si procede, motores.
4. Usar una velocidad práctica baja como 125 o 150, mantener el movimiento corto y terminar con una parada si el robot se mueve.
Ejemplo de detector de marca:
- Si sensor centro > umbral: motores 0,0, LED rojo, mensaje marca.
- Si no: LED azul y, opcionalmente, avanzar durante poco tiempo con 125 o 150.
Imagen y referencia del detector de marca:
En el bucle principal:
[Leer sensores de linea]
si [Lectura en sensor situado en centro > umbral]:
[Cambiar la velocidad de los motores]
Izquierdo: 0
Derecho: 0
[Establecer led] rojo [en] HIGH
[Establecer led] azul [en] LOW
[Escribir] "marca"
si no:
[Establecer led] azul [en] HIGH
[Establecer led] rojo [en] LOW
opcional:
[Cambiar la velocidad de los motores]
Izquierdo: 125
Derecho: 125
[Esperar] 300 milisegundos
[Cambiar la velocidad de los motores]
Izquierdo: 0
Derecho: 0Esta estructura detecta una marca o superficie, pero no intenta seguir toda la línea.
Describe una prueba que salió bien y una que habría que mejorar. Si solo pudiste hacer una prueba, indica qué segunda prueba harías.
Explica por qué tu reto no depende de seguir una línea perfecta. ¿Qué decisión concreta toma el robot con la información del sensor?
Entrega final
12 min
Reto final del robot
Entrega:
1. Nombre del reto.
2. Bloques principales usados.
3. Umbral y evidencia de calibración.
4. Captura o descripción del programa.
5. Resultado observado en la prueba con el robot.
6. Una mejora concreta.
¿Qué has aprendido sobre programar un robot real que no habrías aprendido con una simulación o solo con una placa Arduino?