Lección Teach
Robot Arduino Visual (3/4): sensores de proximidad sin choques
El alumnado usa lecturas del sensor de proximidad en código visual para evitar choques, probar umbrales y explicar cómo cambia el comportamiento del robot.
Resultados de aprendizaje
Leer sensores de proximidad antes de tomar una decisión.
Calibrar un umbral sencillo a partir de observaciones.
Programar una reacción segura ante un obstáculo cercano.
Vista previa de la actividad del estudiante
Contenido de la actividad
Solo vista previa. En una sesión de clase, los estudiantes pueden completar respuestas y entregar su trabajo al docente.
Sensor antes que decisión
8 min
Un sensor es un componente que mide algo del entorno y devuelve una
lectura (un número). El sensor no "sabe" qué hacer; el programa decide. En
este robot, el sensor de proximidad devuelve un número aproximado de 1 a 6:
1 = objeto muy lejos y 6 = objeto muy cerca (cuanto más cerca está el
objeto, mayor es la lectura).
Un umbral es el número de corte que separa "seguro" de "demasiado cerca". El
programa:
1. Lee los sensores.
2. Compara la lectura con un umbral.
3. Elige una reacción.
4. Observa si la reacción fue segura.
Si una lectura de proximidad aumenta cuando un objeto está más cerca, ¿qué significa usar la condición lectura >= 3? ¿Por qué no conviene elegir el umbral sin observar primero?
Medir antes de reaccionar
20 min
La serie (comunicación serial) es un canal de texto del robot a tu pantalla:
sirve para mostrar la lectura del sensor como un número. Si en tu laboratorio no
se ve la salida serie, no pasa nada: en la sección siguiente calibrarás el umbral
observando el LED del robot, sin necesidad de números.
Abre el robot visual y usa el robot recomendado.
Configura comunicación serie.
En el bucle principal, coloca
Leer sensores de proximidad.Lee un valor con
Sensor centro detectar a su izquierda(es la opción por defecto de esta sesión; mide la proximidad por el lado izquierdo del sensor central).Escribe la lectura por serie.
Espera
300a500ms para poder leer los cambios.Verifica, sube y observa lecturas con el robot cerca y lejos de un obstáculo.
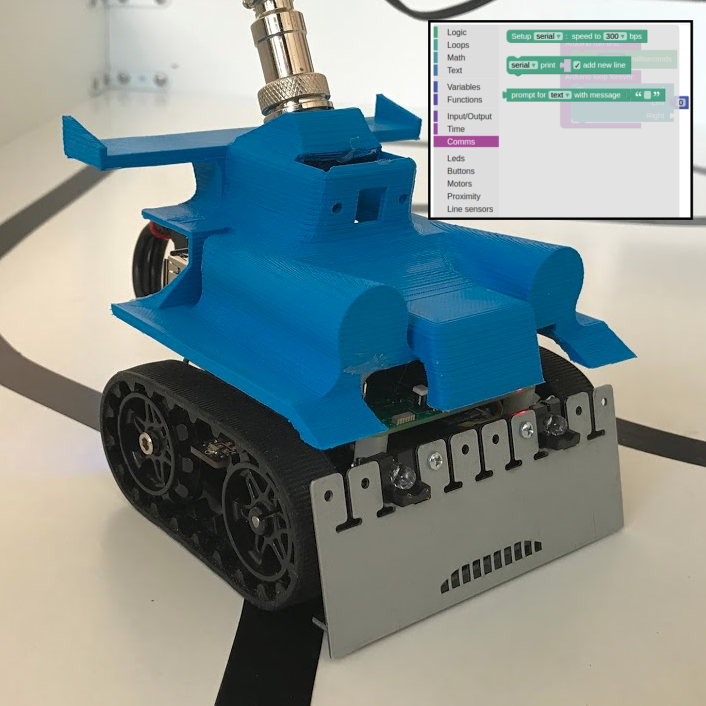
Imagen y referencia para medir:
Antes de usar mensajes:
[Configuración] Serial velocidad 9600
En el bucle principal:
[Leer sensores de proximidad]
[Escribir]
Sensor centro detectar a su izquierda
o
Sensor centro detectar a su derecha
[Esperar] 300 milisegundosEl orden importa: si consultas el valor antes de Leer sensores de proximidad, puedes estar usando una lectura antigua.
Rellena la tabla mientras calibras. Usa al menos tres filas: una con el
objeto lejos, una a distancia media y una cerca; deja las filas extra vacías. En
cada fila anota la situación, el lado del sensor usado, el número o reacción del
LED, si el robot debería reaccionar y cualquier nota útil para elegir el umbral.
| Situación observada | Sensor usado | Lectura (número, o dónde reacciona el LED) | ¿Debería reaccionar? | Notas |
|---|---|---|---|---|
Elige un umbral provisional para distinguir "seguro" y "demasiado cerca". Justifícalo con una lectura de tu tabla.
Programar una reacción segura
18 min
Programa una regla sencilla:
- Si la lectura es mayor o igual que tu umbral: motores a 0, LED rojo encendido y mensaje obstaculo.
- Si la lectura es menor que tu umbral: avanzar despacio con 125 o 150, LED azul encendido y mensaje libre.
No intentes esquivar todos los obstáculos. En esta práctica basta con que el robot avise o se detenga antes de chocar en una situación visible.
Imagen y referencia para reaccionar:
En el bucle principal:
[Leer sensores de proximidad]
si [Sensor centro detectar a su izquierda >= umbral]:
[Cambiar la velocidad de los motores]
Izquierdo: 0
Derecho: 0
[Establecer led] rojo [en] HIGH
[Establecer led] azul [en] LOW
[Escribir] "obstaculo"
si no:
[Cambiar la velocidad de los motores]
Izquierdo: 125
Derecho: 125
[Establecer led] azul [en] HIGH
[Establecer led] rojo [en] LOW
[Escribir] "libre"Si cambias a otro sensor (por ejemplo, detectar a su derecha), cambia solo la lectura del sensor, no toda la estructura del programa.
Calibrar con el LED (si no ves la salida serie): este mismo programa te sirve
para calibrar sin números. Empieza con un umbral (por ejemplo, 3). Acerca y
aleja un objeto del sensor y observa a qué distancia se enciende el LED rojo. Si
se enciende demasiado lejos, sube el umbral; si solo se enciende cuando casi
choca, bájalo. Repite hasta que el rojo se active a la distancia que quieres.
¿La reacción ocurrió demasiado pronto, demasiado tarde o en el momento adecuado? Indica qué cambiarías: umbral, velocidad o tiempo de espera.
Describe una limitación de este sensor o de tu prueba. Por ejemplo: objeto mal colocado, lectura inestable, robot en otra posición o falta de tiempo de cámara.
Entrega de evidencia
9 min
Programa de reacción por proximidad
Entrega tu umbral, una captura o descripción del programa y una observación de una prueba en la que el robot reaccionó o debería haber reaccionado.