Lección Teach
Robot Arduino Visual (1/4): primer movimiento seguro
El alumnado programa el robot Arduino visual para moverse con seguridad, probar arranque y parada, y registrar evidencia del robot remoto real.
Resultados de aprendizaje
Programar un robot móvil real con bloques de motores y tiempo.
Relacionar velocidades de rueda izquierda/derecha con avance, giro y parada.
Registrar evidencia observable de un programa ejecutado en el robot real.
Vista previa de la actividad del estudiante
Contenido de la actividad
Solo vista previa. En una sesión de clase, los estudiantes pueden completar respuestas y entregar su trabajo al docente.
Antes de mover el robot
8 min
Antes de programar, ubica qué parte hace cada cosa. En estas lecciones usarás
los motores y LEDs del robot físico, sus sensores de línea y proximidad, y los
botones A/B/C que aparecen en la interfaz web del laboratorio.
Un robot con dos motores puede avanzar, girar o detenerse según la velocidad de cada rueda. En este laboratorio usarás bloques visuales, verificarás el programa y lo enviarás a un robot real.
Trabajaremos con movimientos cortos:
- Avanzar despacio.
- Parar siempre después de moverse.
- Girar con una rueda o con ruedas en sentido contrario.
- Anotar lo que se observa por la cámara.
Predice qué hará el robot si el motor izquierdo y el derecho tienen velocidad 150 durante medio segundo y después ambos pasan a 0. Explica también por qué conviene añadir al final un bloque de parada que ponga los dos motores a 0.
Crear el primer movimiento
22 min
Abre el laboratorio Robot arduino (visual).
El editor del robot es como el de la Parte 1 (placa): a la izquierda están las
categorías de bloques y arriba los botones Verificar / compilar y
Enviar al robot. Aquí hay además categorías propias del robot: Motores, LEDs,
Botones, Proximidad y Sensores de línea. El bucle principal es el
bloque grande que se repite sin parar (en la Parte 1 lo viste como `Arduino bucle
infinito`): pon dentro lo que quieres que el robot haga una y otra vez.
Abre el editor visual del robot.
Usa el tipo de robot recomendado:
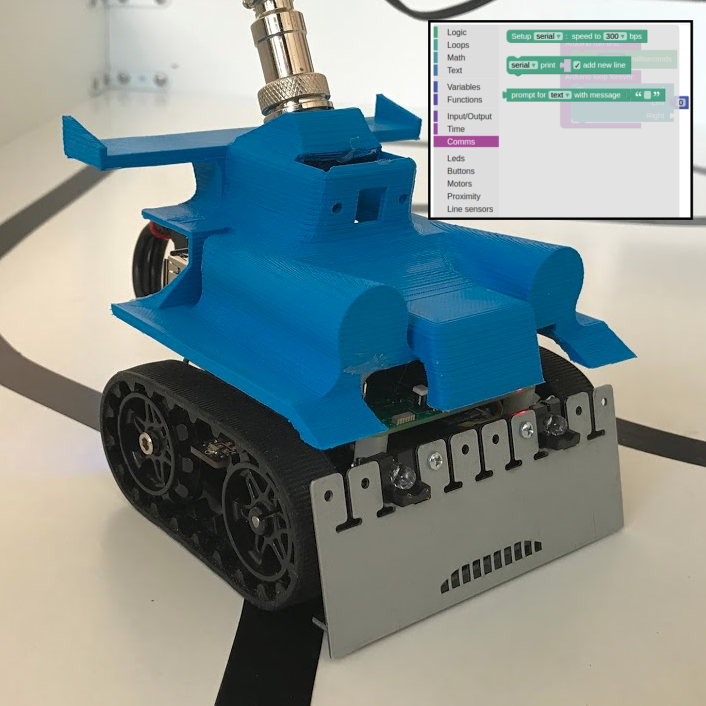
First available robot (of any type of circuit)/Any circuit.Localiza las categorías
Motores,TiempoyComunicaciones(en inglésComms).Dentro del bucle principal, coloca
Cambiar la velocidad de los motores.Escribe velocidad izquierda
150y derecha150.Añade
Esperar 500 milisegundos.Añade otro bloque de motores con izquierda
0y derecha0.Opcional: añade un mensaje por serie como
avance y paro(configuraSeriala9600y usaEscribir) para tener una evidencia extra.Verifica/compila, sube el programa al robot y observa la ejecución.
Imagen y referencia de bloques mínimos:
En el bucle principal:
[Cambiar la velocidad de los motores]
Izquierdo: 150
Derecho: 150
[Esperar] 500 milisegundos
[Cambiar la velocidad de los motores]
Izquierdo: 0
Derecho: 0Si añades mensaje serie, usa primero Configuración con Serial a 9600, y después un bloque Escribir con el texto que quieras registrar.
Esta tabla tendrá tres filas al final de la actividad: una para avanzar y
parar, una para la Prueba A de giro y una para la Prueba B de giro. Ahora,
después de subir el primer programa y observarlo, rellena solo la primera fila
(Avanzar y parar) y deja las otras dos para la fase de giros. En cada fila
escribe las velocidades izquierda y derecha, el tiempo en milisegundos, qué
movimiento viste y si el robot se paró al final.
| Prueba | Motor izquierdo | Motor derecho | Tiempo (ms) | Movimiento observado | ¿Paró al final? |
|---|---|---|---|---|---|
Describe una evidencia concreta de que el programa se ejecutó en el robot real. Incluye qué viste por la cámara y qué mensaje, si lo usaste, apareció por serie.
Giros controlados
15 min
Ahora prueba dos giros cortos. Usa velocidades de 125 a 150 para que los motores tengan fuerza suficiente y tiempos de 300 a 700 ms. Recuerda: una velocidad negativa hace girar esa rueda hacia atrás; por eso, con una rueda hacia delante y la otra hacia atrás, el robot gira casi sobre sí mismo.
Prueba A:
En el bucle principal:
[Cambiar la velocidad de los motores]
Izquierdo: 150
Derecho: -150
[Esperar] 400 milisegundos
[Cambiar la velocidad de los motores]
Izquierdo: 0
Derecho: 0Prueba B:
En el bucle principal:
[Cambiar la velocidad de los motores]
Izquierdo: 0
Derecho: 150
[Esperar] 500 milisegundos
[Cambiar la velocidad de los motores]
Izquierdo: 0
Derecho: 0Después de observar cada giro, vuelve a la tabla anterior y rellena una fila
para Prueba A: giro sobre sí mismo y otra para Prueba B: curva amplia.
No borres la primera fila de avanzar y parar.
Compara los dos giros. ¿Cuál giró más sobre sí mismo? ¿Cuál se pareció más a una curva? Usa tu observación, no solo la teoría.
Si el robot se movió demasiado o demasiado poco, ¿qué cambiarías primero: velocidad o tiempo? Justifica tu elección.
Ticket de salida
10 min
Evidencia del primer movimiento
Entrega una captura o descripción de tu programa y evidencia de al menos dos pruebas: avanzar y parar, y un giro. Debe verse claramente que el robot siempre acaba con los motores a 0.
Explica con tus palabras cómo se parecen y cómo se diferencian estos bloques de otros bloques de movimiento que hayas visto.